Last Lesson, Last Unit, Further Back
I have started doing regular retrieval practice with my classes in the form of retrieval starters. These include questions from Last Lesson, Last Unit and Further Back.
I have started doing regular retrieval practice with my classes in the form of retrieval starters. These include questions from Last Lesson, Last Unit and Further Back.
Half a class
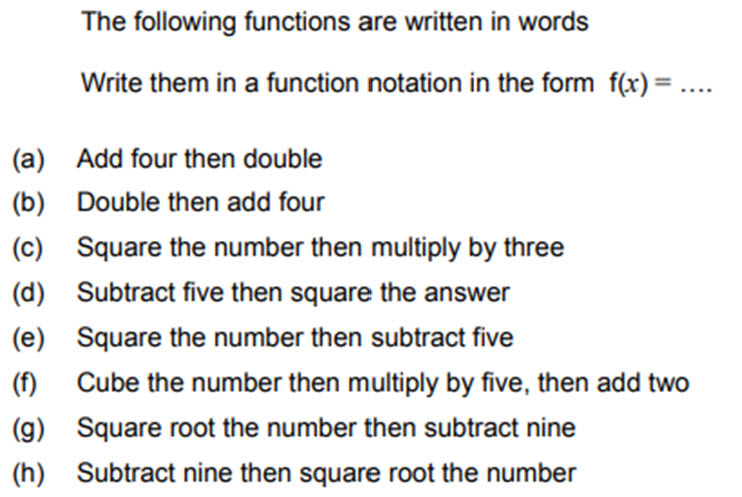
Whilst half the year group were away on a trip, I reviewed some basic functions ideas before we moved on to composite and inverse functions the following week.
Whilst half the year group were away on a trip, I reviewed some basic functions ideas before we moved on to composite and inverse functions the following week.
Twitter for Teachers
After a conversation with some people I thought I would share some of the reasons I use twitter, and some of the ways it has impacted me as a teacher.
After a conversation with some people I thought I would share some of the reasons I use twitter, and some of the ways it has impacted me as a teacher.
Collaborative Project Fair
One of the main aspects of our CPD programme is the Collaborative Project. Each teacher joins a group on a particular aspect of teaching and learning, and throughout the year they meet regularly to discuss the topic, and then head into their classrooms to implement some of the ideas they have discussed. In the next meeting they review, reflect and improve the ideas.
This system has been running in school for a number of years, and when I first got the role of T&L Coordinator, I updated the system a little, to include a group leader who met with me, choosing from a selection of topics rather than free choice, and some ways to provide some accountability. One of these was the Collaborative Project Fair, which we ran for the first time in secondary in 2017.
This year it was bigger than ever, as we had teachers from all three sections of the school (we are a 3-18 school, split across two sites) present at the same event. The fair has a stall for each group where they provide examples of what they have done and talk with those wandering around about their project. We had a total of 27 groups this year. That is a lot of things that people have been investigating.
The stalls were amazing, and talking to our teachers it was clear that they were engaged in the aspect of education they were looking into. Of course, some were more into it than others, but everyone got involved.
For me, one of the nicest things was to have the whole school together (it is not something that happens often, and never in a Teaching and Learning capacity), and this is something I want to push for more of. It was amazing to see what our colleagues are doing with 3-4 year olds, and seeing the progression through the school was fascinating.
The days before the fair were rather stressful, and I was running on adrenaline, but by the time it actually got underway, I was ready to see what the groups had prepared. And now it is over? Some time to get back to preparing my classes, and spending more time with the family.
One of the main aspects of our CPD programme is the Collaborative Project. Each teacher joins a group on a particular aspect of teaching and learning, and throughout the year they meet regularly to discuss the topic, and then head into their classrooms to implement some of the ideas they have discussed. In the next meeting they review, reflect and improve the ideas.
This system has been running in school for a number of years, and when I first got the role of T&L Coordinator, I updated the system a little, to include a group leader who met with me, choosing from a selection of topics rather than free choice, and some ways to provide some accountability. One of these was the Collaborative Project Fair, which we ran for the first time in secondary in 2017.
This year it was bigger than ever, as we had teachers from all three sections of the school (we are a 3-18 school, split across two sites) present at the same event. The fair has a stall for each group where they provide examples of what they have done and talk with those wandering around about their project. We had a total of 27 groups this year. That is a lot of things that people have been investigating.
The stalls were amazing, and talking to our teachers it was clear that they were engaged in the aspect of education they were looking into. Of course, some were more into it than others, but everyone got involved.
For me, one of the nicest things was to have the whole school together (it is not something that happens often, and never in a Teaching and Learning capacity), and this is something I want to push for more of. It was amazing to see what our colleagues are doing with 3-4 year olds, and seeing the progression through the school was fascinating.
The days before the fair were rather stressful, and I was running on adrenaline, but by the time it actually got underway, I was ready to see what the groups had prepared. And now it is over? Some time to get back to preparing my classes, and spending more time with the family.
Successes and Targets
After seeing a tweet from @mrgordonmaths, I reflected on my targets for next year, and also the successes from this year.
After seeing a tweet from @mrgordonmaths, I reflected on my targets for next year, and also the successes from this year.
The hardest time of my life
As my son turns 1, I give a very personal account of the hardest time of my life.
As my son turns 1, I give a very personal account of the hardest time of my life.
T&L Newsletter Issue 9
The latest issue of the T&L Newsletter is available here which includes
The latest issue of the T&L Newsletter is available here which includes
- Blogs on Active Learning, the Value of Student Feedback, an experience shadowing students and a summary of Seven Myths About Education
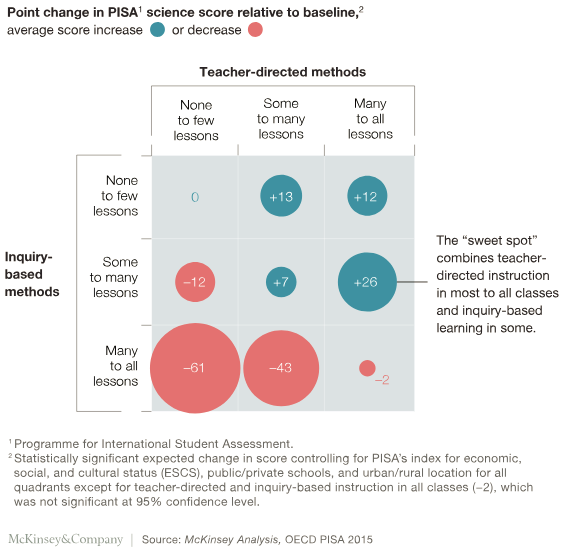
- An overview of how and why spaced retrieval works, and some examples on how to use it
- 8 links to external blog posts
 RSS Feed
RSS Feed